Presence Radar Direction Scanner
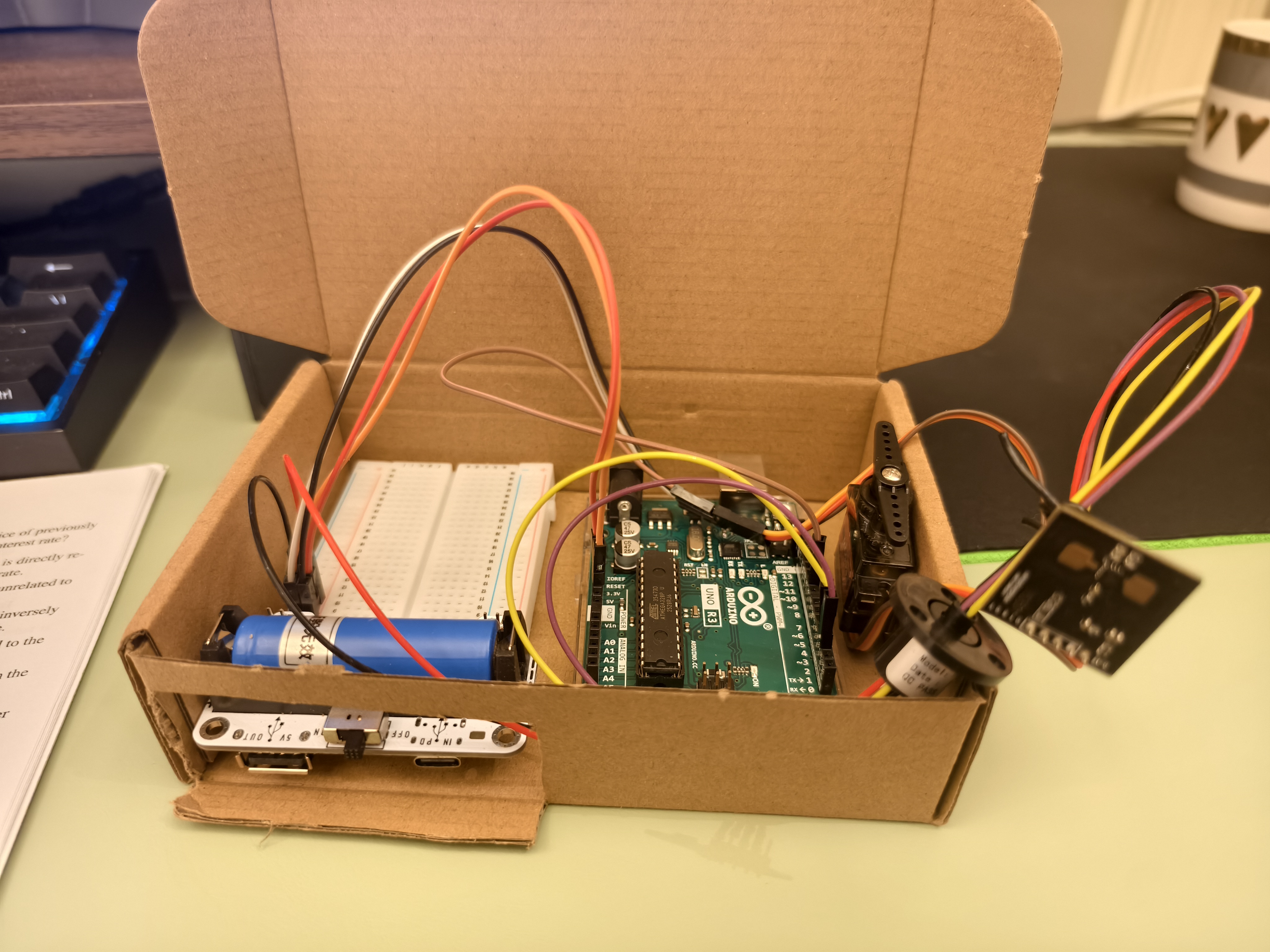
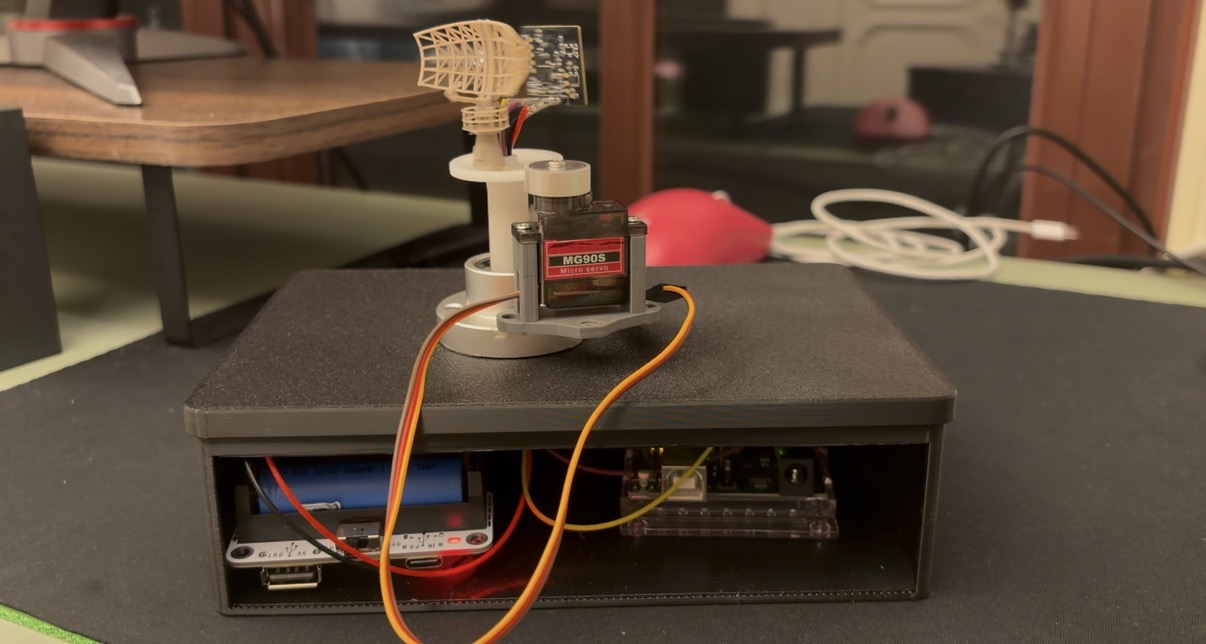
This project uses an Arduino Uno, a continuous rotation servo, and an ME73MS01 mmWave presence sensor to build a rotating human-presence scanner. Instead of measuring distance, the system records whether a target is detected at each estimated angle and highlights recent active directions in a browser view.
The live version runs locally with Flask because the browser must read serial data from the Arduino on COM8. The public page documents the hardware, data format, and current visualization behavior.
Current Wiring
Data Format
The Arduino sends one line per scan step. The Flask app parses these lines and draws the active directions.
angle,presence 0,1 2,1 4,0 6,0
Local Run Flow
cd E:\GitHub\Ley1Wang_Web.github.io\radar_app python app.py # then open http://127.0.0.1:5000
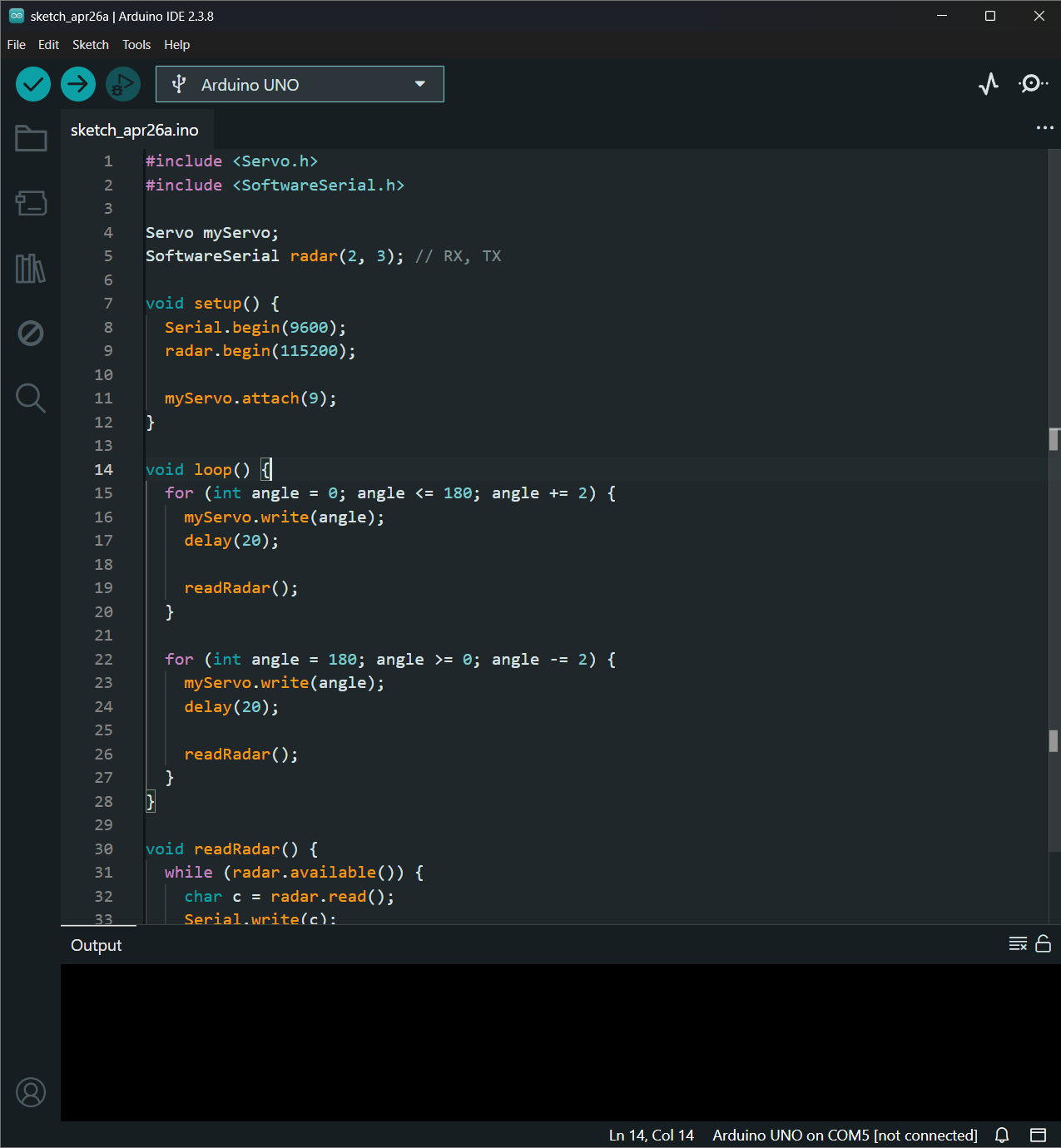
Arduino Logic
const int presencePin = 8;
int raw = digitalRead(presencePin);
presence = raw == HIGH ? 1 : 0;
Serial.print(angle);
Serial.print(",");
Serial.println(presence);
Build Notes
The ME73MS01 output line is used as a simple target-present signal. The live radar view does not claim distance measurement; it visualizes the recent directions where the sensor output was active while the servo platform rotates.